登录
登录
 注册
注册
中国科学家设计超薄指尖传感器,可用于外科微创手术
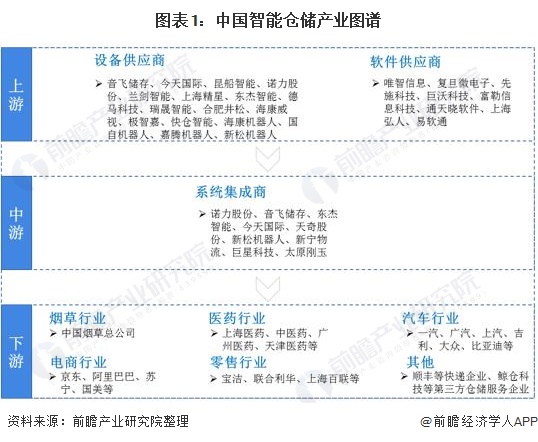
视频中的人,蒙着眼睛,只需要用手指触摸,就可以辨别出纸上的字母。实现这个能力,用的是一个重量仅为 1.3 克的设备。而负责给指尖传导信号的硅胶薄膜,只有 18 微米厚。这个厚度,薄于一张普通 A4 纸厚度(104 微米)的五分之一,也远远小于人体表皮的厚度(数十到上千微米)
这是中国科学家冀晓斌领衔开发出的新型设备,只用 1.3 克的重量,能够产生 1 到 500Hz 的震动信号,给手指传递不同的触感。实现 “盲人摸字” 的原理很简单,用发光二极管作为传感器,感知纸面反光的强度,将信号传递给一个微型控制器。当触碰到黑色的区域,设备就会自动开启,将异样的触觉传递给指尖。人通过触觉反馈,就能识别出图案。
这个设备的名字叫做 feel-through DEA(下称 FT-DEA),“盲人摸字”的试验,只是对其功能的一个验证。更重要的是,这种轻巧的触觉传感器,提供了一种新型的人机交互界面,具有高灵敏度和宽信号频域,如果跟不同的 VR 或 AR 设备结合,就可以开发出更逼真的虚拟现实或增强现实体验。
冀晓斌介绍,”feel-through”表明了这款新型穿戴装置的优势。由于其轻薄的特性,18 微米的薄膜既能够传递给手指额外的触觉信号,同时又保持了人手指日常的感觉和活动功能。“戴上这个装置,继续敲键盘,喝咖啡,或者是触摸其它物品,都不会受影响。”
冀晓斌于 2013 年和 2015 年先后在法国获得学士与硕士学位,2019 年在瑞士洛桑联邦理工学院(EPFL)获得微系统与微电子博士学位,回国后,成为河北工业大学校聘教授,属于该校李铁军教授团队成员,研究方向是小型智能软体机器人系统与可穿戴设备。
他告诉 DeepTech,自己原本在 EPFL 做博士后,12 月回国,正好赶上疫情,就辞去了在瑞士的工作,决定在国内高校任职。在几个选项中,他被河北工业大学所提供的资源和平台所打动,最终选择了这里,目前他正在筹备自己的实验室。
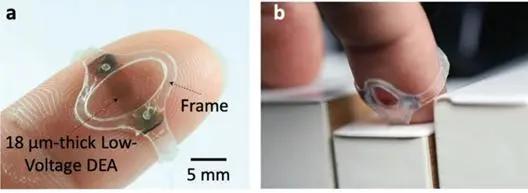
图 | a. 指尖上的 Feel-through DEA 触觉设备;b. 佩戴 FT-DEA 弹钢琴(来源:论文)
超薄触觉反馈装置,实现新的人机界面
一提到 VR 和 AR 设备,标志性的设备就是头戴眼镜,它能够呈现出栩栩如生的画面和声音。但这只是虚拟体验的一部分,更困难的是提供虚拟触觉。
目前,实现与虚拟对象的互动,需要使用手持的电机设备,它们不仅笨重,也只能传导非常粗糙的触感,使用的时候,需要以特定的姿势持握,对人的动作限制也很大。也就是说,现有的手持设备,会阻止人手原有的力学感受功能,穿戴上以后,手指日常的功能就会受到影响。

图 | Valve Index VR 设备
要实现科幻电影里身临其境的 VR 和 AR,必须要有更轻便的触觉传感装置。冀晓斌和同事们的工作,就是在这一思路下诞生的。
能够做出如此轻便的设备,关键的技术在于以极低的电压输出高功率密度,从而将人类能够识别的信号送达到指尖。虽然硅胶薄膜只有 18 微米厚,但是在输出信号为 580Hz 时,功率密度能够大于 10W/m。
低驱动电压,使得 FT-DEA 的控制与供能设备可以做得足够小,来实现无线工作,这满足了穿戴设备的需求。
低电压的技术,是冀晓斌在博士课题中实现的突破。他在 EPFL 做博士期间,师从软体传感器实验室(EPFL—LMTS)主任 Herbert Shea 教授,完成了 “低电压高速率介电型弹性体驱动器” 的课题。高驱动电压是 20 多年来困扰 DEA 领域的一个基本问题。
所谓 DEA,是介电型弹性体驱动器的简称。冀晓斌介绍,这是一种电驱动的人工肌肉,可以将电能转化为机械能。
冀晓斌的博士课题成功地将 DEA 驱动电压降低了一个数量级,并且研发出了前所未有的高性能、低电压 DEA。
冀晓斌也针对开发的低电压、高性能 DEA 设计了新型应用,之前设计的软体机器昆虫,发表于机器人顶尖期刊 Science Robotics;此次的 FT-DEA 则是可穿戴的触觉反馈装置,于 2020 年 10 月发表于材料学期刊Advanced Functional Materials 上。两篇论文,冀晓斌都是一作。

图 | 冀晓斌(来源:受访者)
DEA 所使用的硅胶薄膜本身不导电,它双面涂上电极后相当于一个电容器,当充满电之后,两电极间产生的静电力在厚度方向压缩硅胶薄膜,从而让薄膜面积增大产生形变。这一过程把电能转化成了机械能。使用不同频率的控制电信号,可以控制驱动器的运行速率。
冀晓斌形容,“通俗地讲,DEA 就是一个软体平行板电容器。”使用聚二甲硅氧烷(PDMS)这一材料当作介电层的性能优势是相关 DEA 的反应速率快,能够达到毫秒级别。由于 PDMS 这种材料的粘弹性很小,相比于其它的介电材料(比如 VHB)其力学性质对DEA 运行速度的影响要小的多。
在指尖实现不同类型的信号传导
手指尖端有丰富的感受神经,而以弹性硅胶为材料的 DEA 能够适应手指的形状并且贴合皮肤。FT-DEA 在通电工作时完全静音,因此非常适合作为穿戴于指尖的触觉反馈器。
FT-EDA 戴在手指上,在不通电的时候,硅胶薄膜处于预拉伸的状态,会给指尖皮肤一个轻微的压力。当通电之后,静电力产生作用,DEA 激活,就会释放预先施加的压力,从而使皮肤产生正方向(纵向)的位移。当使用从 1 到 500Hz 不同的驱动频率,薄膜会产生对应不同的位移和拉伸,从而产生不同的触觉反馈信号。


图 | d. DEA 通过拉伸皮肤来给穿戴者产生触觉反馈信号 e. 电压开关状态下皮肤以及 FT-DEA 侧视图。(来源:
那人类是否能够准确识别出不同的信号类型呢?
研究寻找了 11 个不同性别、年龄的使用者,通过两个测试来收集他们的反馈。第一个测试,研究人员用不同频率的信号进行测试,让使用者评判是否能够感知到信号,并按照感觉强度从 0(没感觉)到 4(感觉很强)给出打分。最终的结果显示,除了关机时的感觉为零,_几乎_其它的频率都可以被感知到,而在 5 到 200 Hz 的区间,感知程度都保持在 2 以上。
在第二个测试中,使用者被随机给予 6 种不同的信号类型:10Hz、200Hz、在 10Hz 与 200Hz 间切换、由关闭升为 200Hz、由 200Hz 降为关闭、关闭。通过 10 分钟的简单学习后,使用者被随机给予不同的信号刺激,并进行辨别,结果显示了 73% 到 97% 的辨别正确率。
这两个试验证明,仅仅通过目前指尖单点的装置,已经能够成功传导多种触觉信号。
图 | a. 使用者对于不同频率信号的反馈强度平均值统计 b. 使用者对 6 种不同信号的识别混淆矩阵,对角线显示为正确率(来源:论文)
冀晓斌表示,这仅仅是一个初步验证,证明 FT-DEA 准确表达触觉信号的可行性,研究中已经展示了 10 个 DEA 在手指上形成的一个阵列结构,未来将突破单点的信号模式,使用 DEA 阵列来模拟局部的手部感觉,或者反馈更为完整的运动路径。

图 | 10 个 DEA 组成的阵列,覆盖在手指上。(来源:论文)
专访一作冀晓斌
DeepTech:请问 FT-DEA 的结构是怎样的?
冀晓斌:这是一个多层的结构,两层电极中间夹一个介电弹性体硅胶层,是一个基本的单元。一共有 3 个单元堆叠起来,总计共有 7 层,其中有 4 层电极,3 层硅胶层。这样设计的目的是增大它的输出力,单硅胶层厚度是 6 微米。在这项工作中,我们堆叠了三层,手指尖端的感受很灵敏,如果将来应用于身体其它部位,比如背部,有对输出力的强度有更高的要求,可以通过堆叠更多的厚度来增加输出力,从而使其它部位也能够感受到反馈信号。
DeepTech:FT-DEA 的特色是能够在低电压的驱动下,以非常薄的材料实现其性能,这建立在你博士课题的技术突破上,实现低电压驱动的难点在哪里?
冀晓斌:降低 DEA 驱动电压大致有两种方法,第一,增加介电层的介电常数。第二,降低介电层的薄膜厚度。我们选取的是第二种途径。
当薄膜厚度降低后,对薄膜的质量要求很高。如果薄膜质量不高,比如厚度不均匀,相关 DEA 性能会受限制。
更加具有挑战性的是,降低介电层厚度后,对 DEA 的电极要求苛刻。既需要有很好的导电性能来保证 DEA 快速充放电,又必须具备很好的力学性能来降低对整个薄膜结构的僵化。我们开发了基于 Langmuir 原理的先进纳米制造工艺来二维组装 DEA 的可拉升电极。研发出了分子厚度的可拉伸电极来满足这些苛刻要求。
DeepTech:在蒙眼识字的试验中,增加了一个发光二极管,它的作用是什么?
冀晓斌:这个实验中我们做了一个集成的无线控制系统,整体装置只有 1.3 克,这也是可穿戴设备的要求,不能很重,不会影响正常生活。发光二极管的作用是识别颜色,它能够探测颜色,将收集到的信号传导给微控制器,从而决定 FT-DEA 是否开启。当探测到黑色的时候,微控制器就会反馈出 450 伏 200 赫兹的频控制信号,而在白色的时候是关闭的。使用者通过手指的感受就可以读取黑色的字母。
DeepTech:目前只进行了一个识字试验,FT-DEA 还有哪些应用的潜力?
冀晓斌:VR 里,可以应用它去触碰一些虚拟的物体。研究中展示了一个戴在手指上的矩阵,假设它可以覆盖整只手,就可以实现感知一些虚拟的图像,或者当手做出一个类似抓握这样的动作时,也可以给予相对应的反馈信号。
当然我们目前只是模拟了表皮上的触觉,如果未来的 VR 要实现让人感受到一个不存在的事物,比如拿住一支笔,需要完整的信息,包括关节的姿态,还有皮肤的触觉,一个理想的手套是能够完成所有的任务的。这也是将来要突破的工作。
另外在一些需要精细操作的地方,比如一些外科手术、精细组装等,人体本身的精度是有限的,在精细操作的时候容易产生误差,而电子设备能够实现更高的精准度。
比如一些外科微创手术,能够通过它来告知操作者精度的范围,帮助人手实现更好的操作。这能够实现人和机器之间更密切的交互,机器通过触觉反馈给人类信号,比如将一层这样活性的薄膜戴在手上时,就增强了人机交互的维度,同时具有便利性。